Afin de vous accompagner au mieux dans la réalisation du Whoopee, je vais vous guider étape par étape.
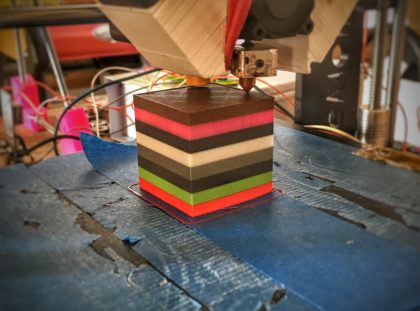
L’impression 3D du drone :
Commencez par récupérer les fichiers sur Thingiverse à cette adresse. Imprimez bien sûr qu’une fois le support de caméra en choisissant le bon angle qui vous convient.
En fonction du plastique que vous utiliserez, l’assemblage peut être plutôt difficile. Comme je l’ai dit dans mon précédent article sur ce drone, j’ai dû augmenter l’échelle à 106%. Imprimez-le plutôt dans un plastique résistant comme l’ABS ou le HIPS (c’est moins cher mais il faut pouvoir chauffer plus). Un remplissage de 100% est recommandé et c’est pas pour 2 micro grammes que vous aller gagner qui vont changer grand chose. Au niveau des supports, réglez-les pour un angle de 40% voir 35%. Vous aurez un peu de nettoyage mais la pièce sera plus solide.
Je peux aussi vous envoyer le châssis imprimé (dites-moi dans le champs de commentaire paypal ce que vous voulez comme angle de caméra) :
[paypal_wp_button_manager id=289]
Après quelques heures d’impressions et surement quelques ratés, un petit nettoyage s’imposera sans doute et on passe à l’électronique.
L’électronique :
Je pars du principe que vous avez déjà un transmetteur (une Taranis) et un casque ou des lunettes d’immersion. Si vous voulez une radio pas chère je vous conseille celle-là. Mais prenez ce récepteur et pas celui que je vous recommande en dessous.
Les liens suivants sont tous sur Banggood.com et je vous recommande de prendre les frais de port de 7 à 10 jours sans quoi vous allez devoir attendre 3 mois 🙂
On a donc besoin d’une carte de vol pour moteur à broches. Et on va prendre celle-là : Micro 32bits F3 Brushed Flight Control Board SPR F3 – 16€
Il nous faut ensuite un récepteur, j’en pris un compatible avec ma Taranis et PPM (Protocol de communication entre le récepteur et la carte de vol) SRP8 8CH PPM Receiver D8 protocol – 17€
Pour voler il nous faut des moteurs et des hélices, j’ai pris ceux-là : 2X Eachine 3-blade Propeller 8Pcs & 8.5x20mm Coreless Motor – 13€ ainsi que des hélices qui vont avec : 5X Eachine 3-Blade Propeller Prop 20Pcs – 5€
Évitez de les prendre blanches car quand elles ont pris un coup et qu’elles sont tordues, la marque blanche qui apparaît ne se voit pas. Exemple.
Pour l’immersion, il nous faut un combo VTX/Caméra : Eachine TX01 600TVL 1/4 cmos caméra fpv 25MW VTX – 20€ Il existe une version 200mW mais c’est inutile (plus de consommation et rebond des ondes en vol intérieur).
Enfin il nous faut une alimentation, des batteries 1S 3,7V 600mAh (prenez en plusieurs, une dizaine) et vous pouvez prendre ce chargeur. J’ai des batteries de 370mAh et c’est vraiment pas assez.
Comme je l’ai dit, sans transmetteur ni lunettes ou casque d’immersion cela vous coûtera moins de 100€.
Si vous voulez un casque ou un écran (l’écran permettant d’enregistrer la vidéo en plus de pouvoir voler), je vous conseille ce casque pas cher.
Mais si vous voulez un écran, prenez celui-ci. Prenez aussi une carte micro SD classe 4 minimum si vous voulez enregistrer.
Si vous avez besoin de conseil pour un transmetteur, n’hésitez pas à me demander avant de commander vos composants. Les transmetteurs et les récepteurs ne sont pas tous compatibles entre eux.
Pensez à vous équiper d’un câble micro USB data (c’est important, la plus part des câbles ne sont pas capables de transférer des données).
On passe au montage.
Montage :
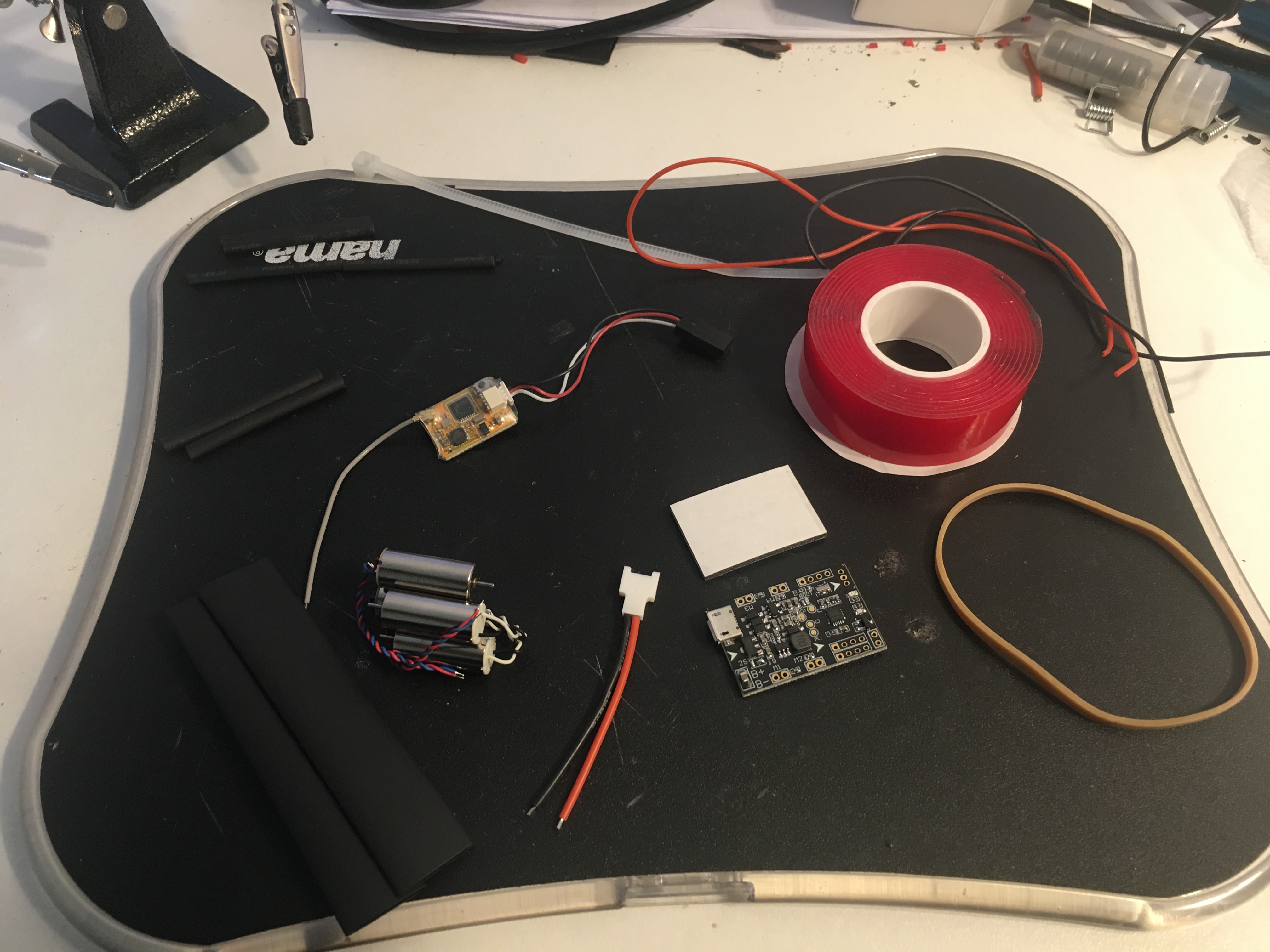
Pour le montage, on va avoir besoin d’un fer à souder avec une petite panne, d’étain, de gaines thermo-rétractable (les plus petits diamètres et des plus gros pour les moteurs), de serre-câbles, d’un élastique assez grand, du double-face épais ainsi que des petits fils pour allonger ceux des moteurs. (Certaines photo on été faites pour un autre drone mais le montage est le même).
Les moteurs sont de 2 types : les horaires et les anti-horaires. Je n’ai pas cherché à savoir lequel est lequel, j’ai tout branché et j’ai vérifié (partie configuration des moteurs) puis dé-soudé et ressoudé au besoin. On allonge donc les fils des moteurs et on utilise les petites gaines thermo pour isoler.
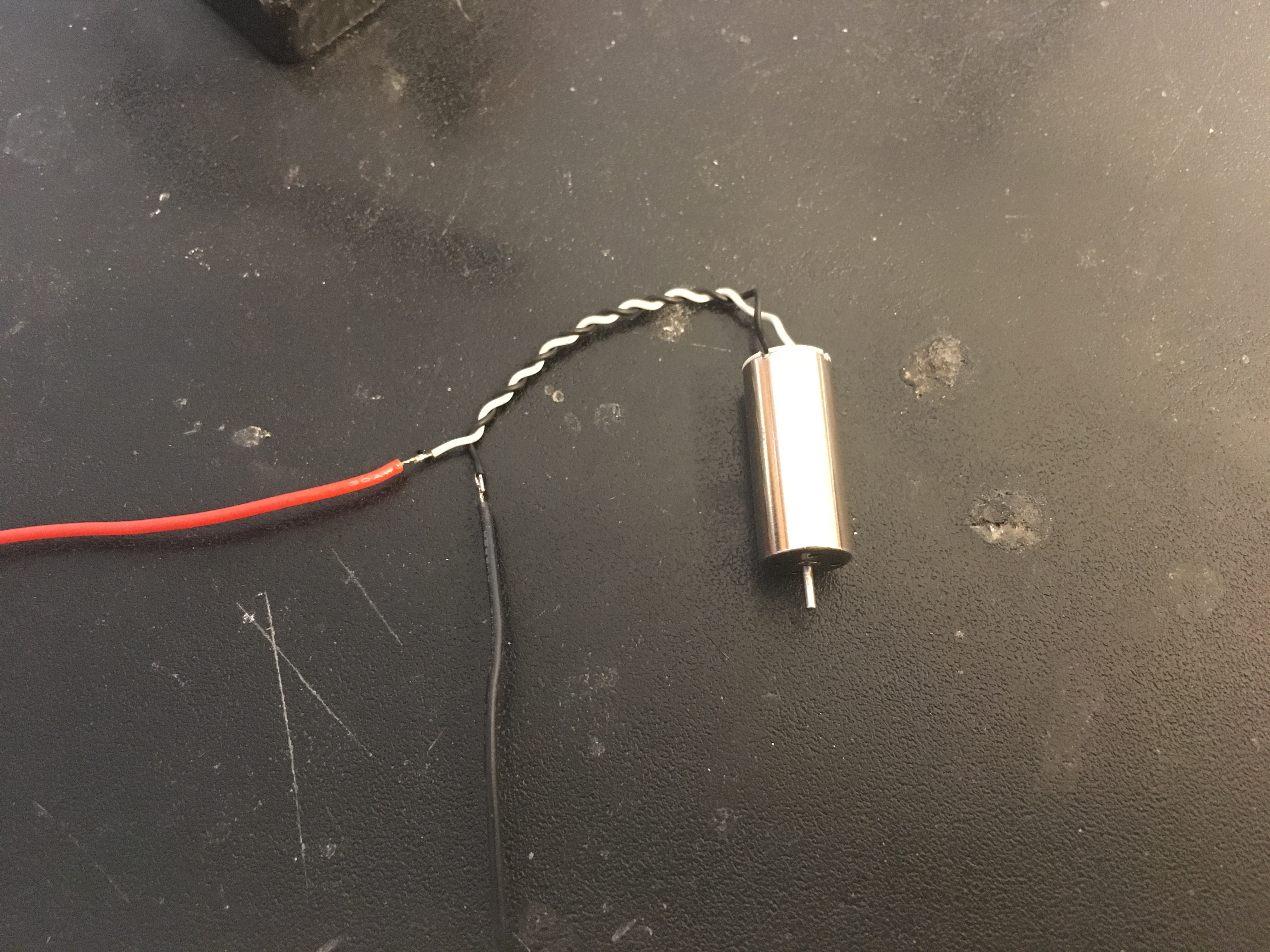
J’ai fait correspondre les couleurs quand je le pouvais (rouge avec le rouge et noir avec le noir).
Utilisez la plus petite gaine thermo et passez-la dans un des fils. Chauffez-la avec le fer à souder.
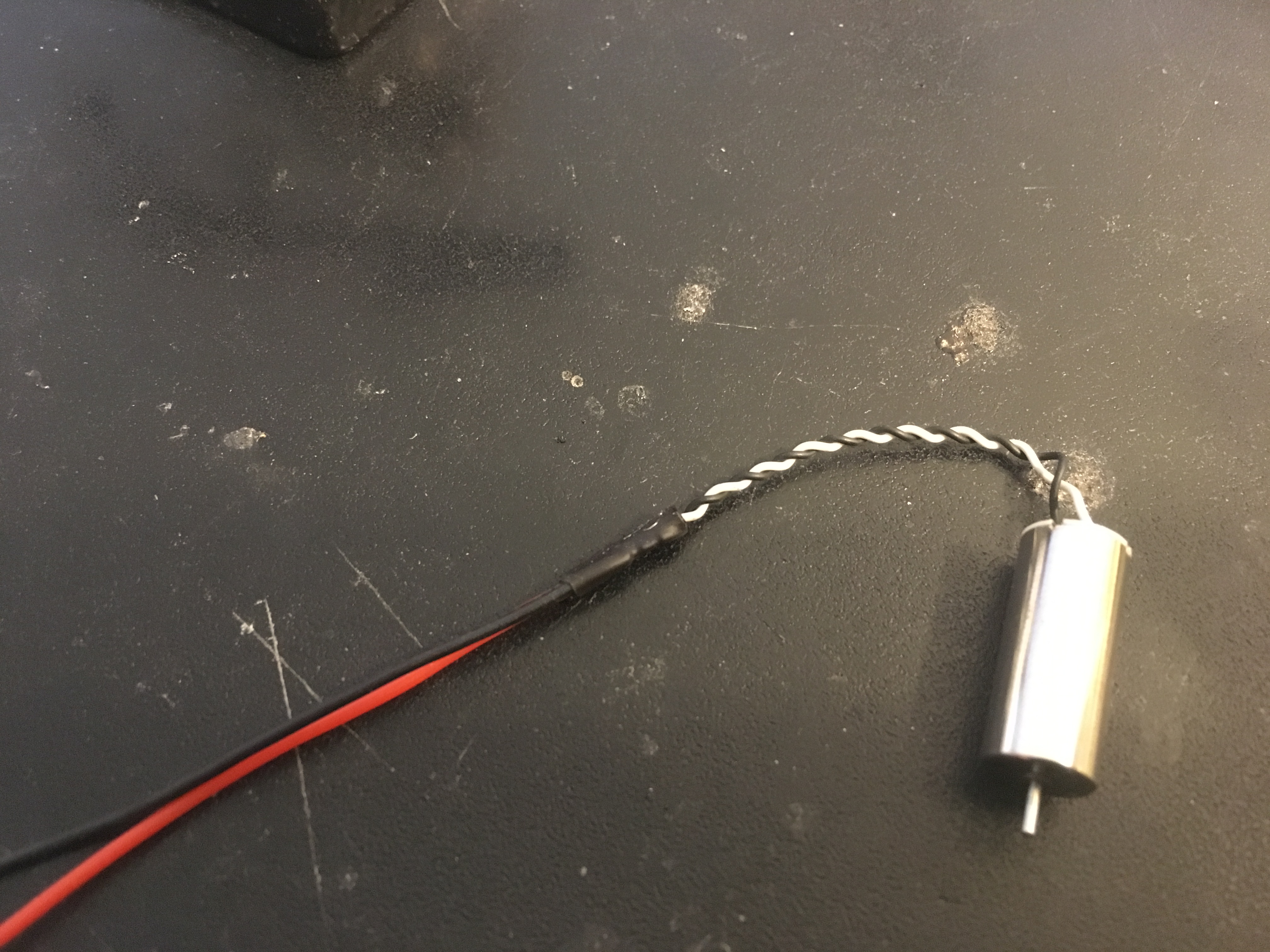
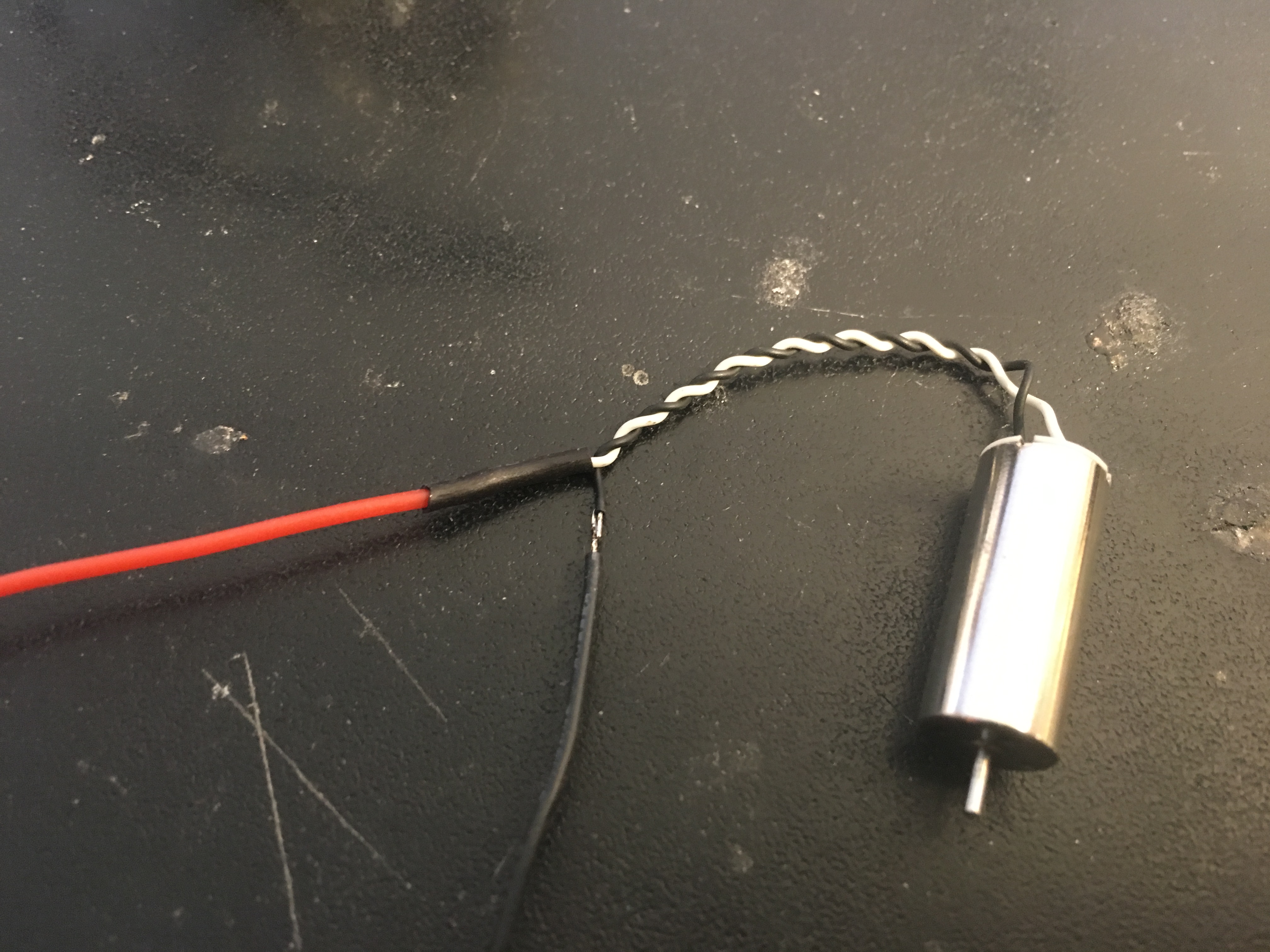
Prenez ensuite une gaine un peu plus grande et passez les deux fils dedans. Utilisez le fer à souder (pas la panne mais ce qui la tient) pour chauffer la gaine. Les fils sont trop fins pour le briquet.
Regardez le manuel afin de connecter vos moteurs et le câble de la batterie.
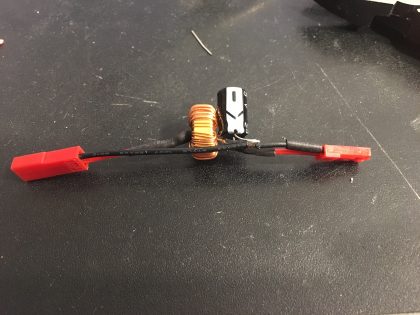
Préparez aussi le câble du VTX/Caméra, pour cela prenez la rallonge fournie et coupez-la. Soudez-la au-dessous de la carte au même endroit que le connecteur d’alimentation. Les deux câbles d’alimentation (celui de la batterie et celui du VTX) doivent être dans le bon sens, avoir la bonne polarité. Il n’y a pas de protection et un mauvais branchement peut faire frire votre carte ou votre VTX.
Soudez ensuite votre récepteur au bon endroit.
[bs_row class= »row »]
[bs_col class= »col-sm-6″]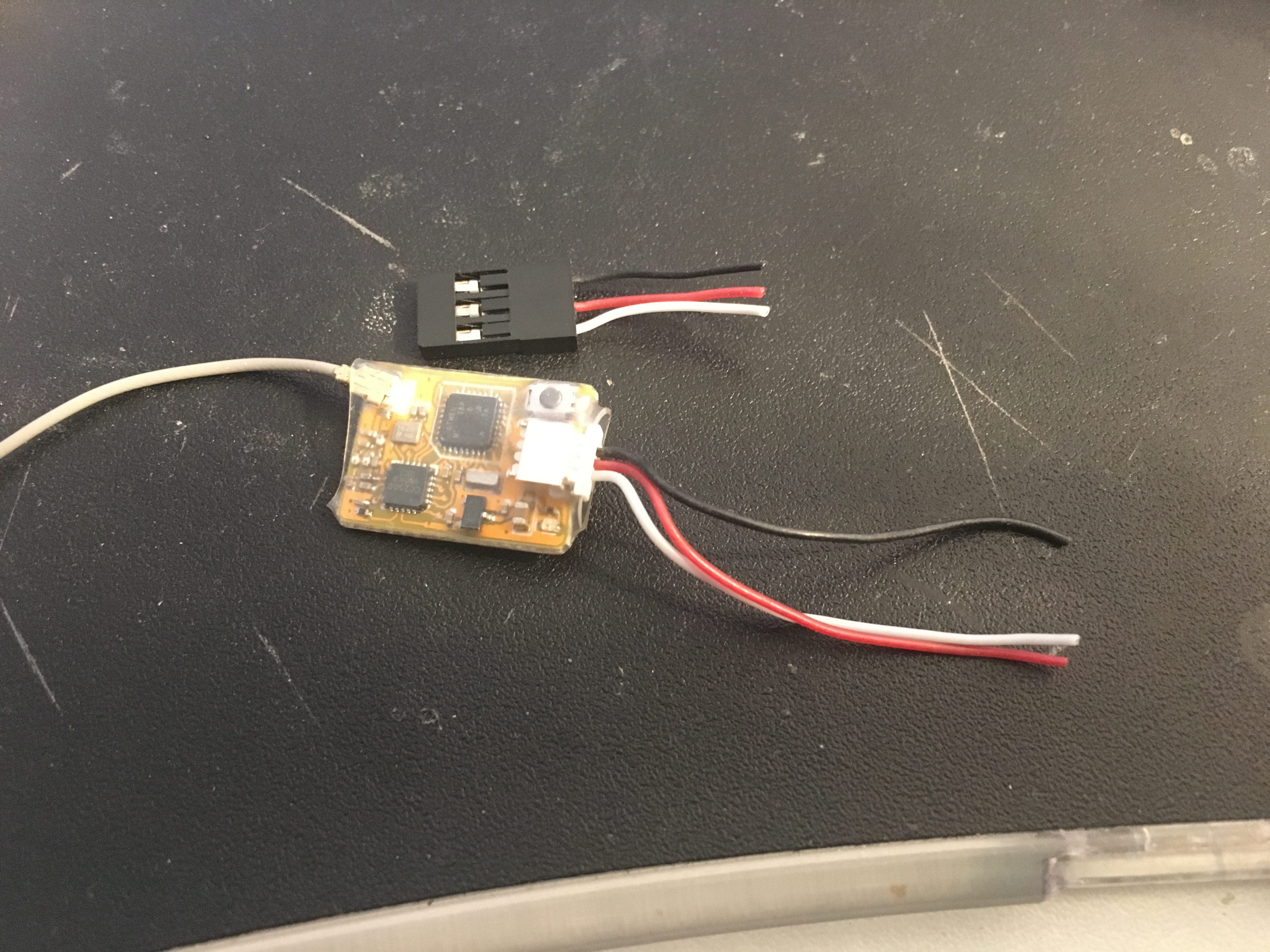 [/bs_col]
[/bs_col]
[bs_col class= »col-sm-6″]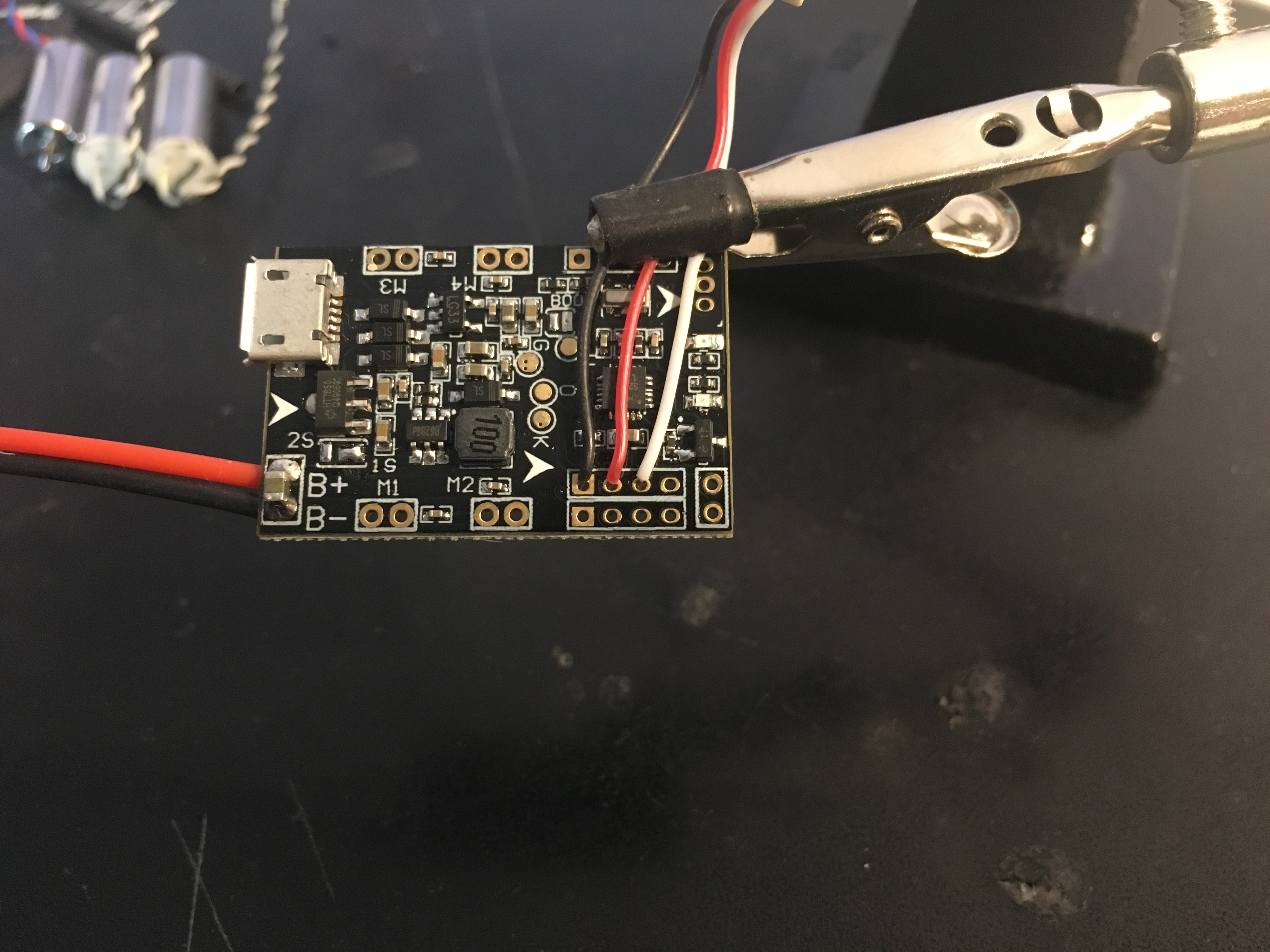 [/bs_col]
[/bs_col]
[/bs_row]
Pour ma part j’ai suivi le manuel et je l’ai soudé sur le port UART2.
Vérifiez toutes vos connections plusieurs fois et avec un multimètre si vous en avez un (vous devriez en avoir un).
Branchez la batterie et si le récepteur s’allume et qu’il n’y a pas de fumée magique, c’est bon 😉
Avec le scotch double face, on colle le récepteur sur la carte de vol. On utilise la petite mousse fournie avec la carte de vol pour la fixer à la plaque imprimée en 3D comme le montre la photo.
Fixez la caméra dans son support avec du scotch double face. Il se peut qu’il ne rentre pas et une petite entaille pour faire passer l’afficheur LED peut être nécessaire. Une fois la caméra en place, mettez la protection d’antenne et si vous avez un peu de superglue, une petite goutte dans les encoches est un plus.
On met les moteurs dans leurs emplacements et on fait ressortir le câble sur le coté pour venir mettre de la gaine thermo qui nous sert à 3 choses : protéger les moteurs et les fils, évitez que ceux-ci ne tombent et faire un train atterrissage.
[bs_row class= »row »]
[bs_col class= »col-sm-6″]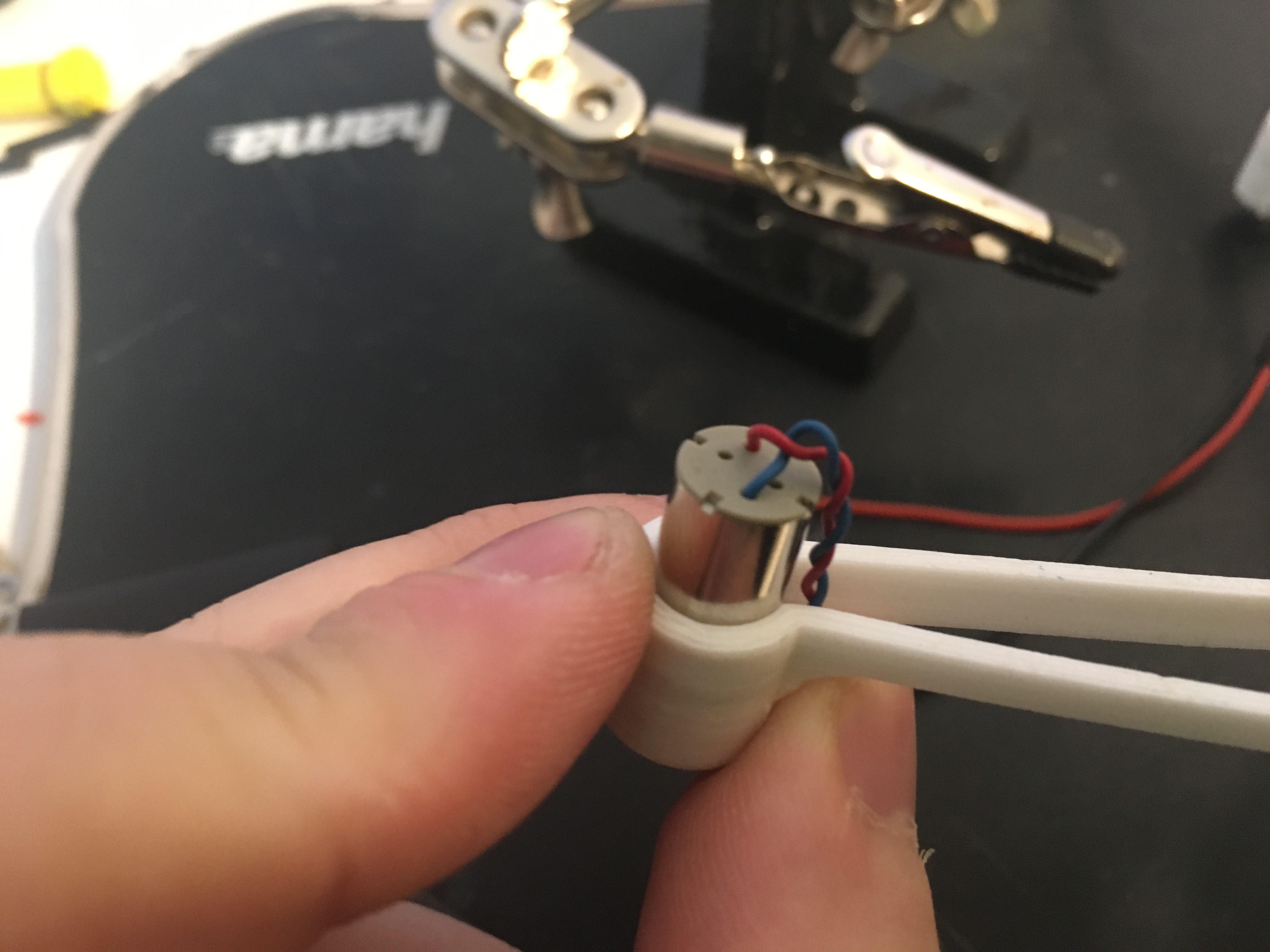 [/bs_col]
[/bs_col]
[bs_col class= »col-sm-6″] [/bs_col]
[/bs_col]
[/bs_row]
Attention à ne pas trop chauffer la gaine sous peine de brûler les fils internes des moteurs. J’ai utilisé une pince pour venir coller la gaine qui dépasse, ça rend le tout plus robuste.
Pour fixer la caméra sur le châssis, on utilise, là encore, du scotch double face. Placez-le en-dessous du support caméra et mettez le tout en place à l’avant du châssis. En fonction de la où vous le placez, le centre de gravité va changez. Placez-le bien.
Utilisez un serre-câble pour fixer la carte de vol et son support au châssis.
Passez l’élastique autour du drone afin de garder les câbles des moteurs au bon endroit et de fixer la batterie tout en permettant de la changer facilement.
Le double-face et l’élastique permettent, en cas de crash, de laisser les éléments se détacher pour éviter qu’ils ne se cassent 😉
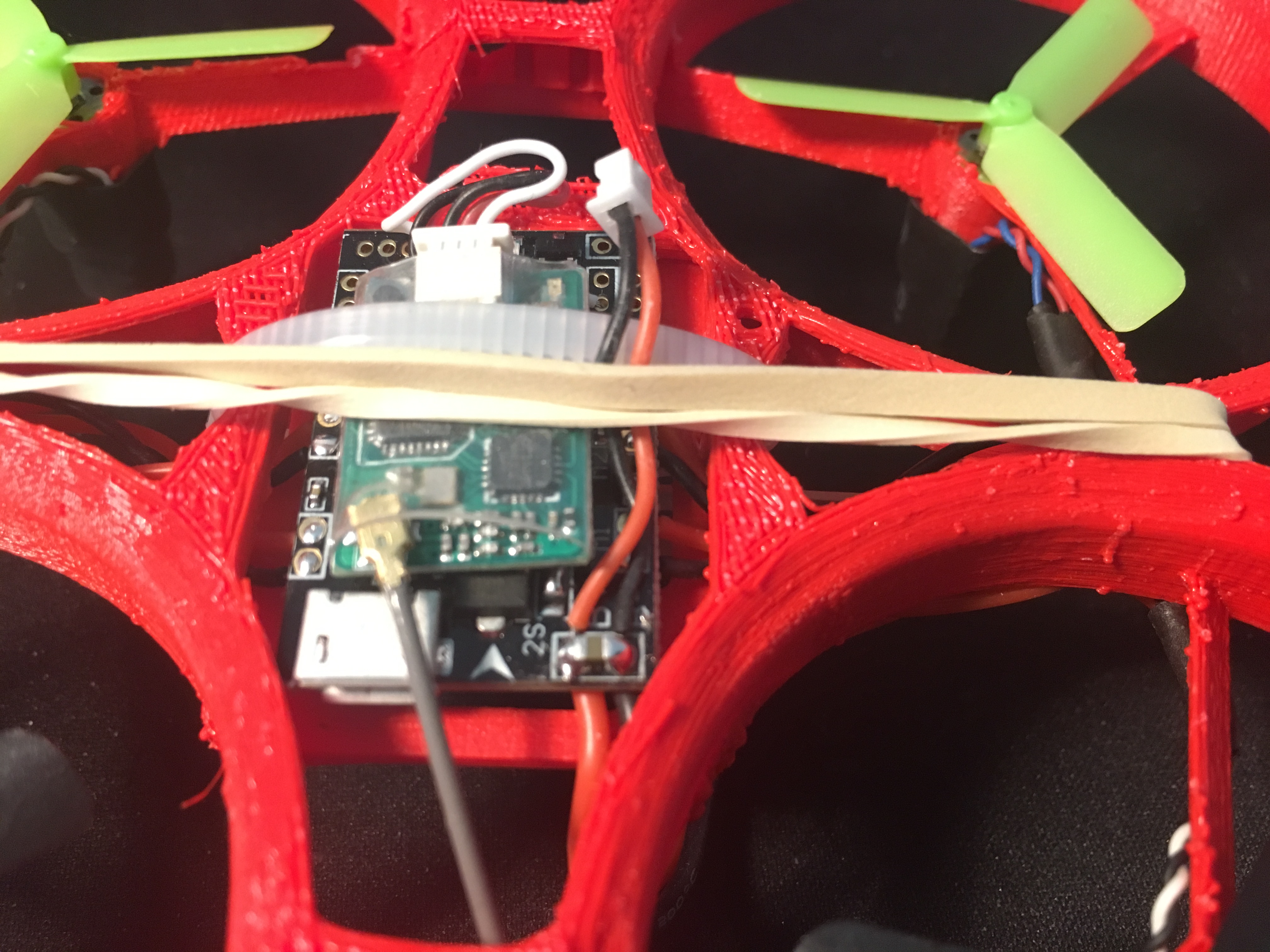
On a maintenant quelque chose qui ressemble à ça (la position du VTX/Caméra peut changer en fonction de votre choix) :
[bs_row class= »row »]
[bs_col class= »col-sm-6″] [/bs_col]
[/bs_col]
[bs_col class= »col-sm-6″]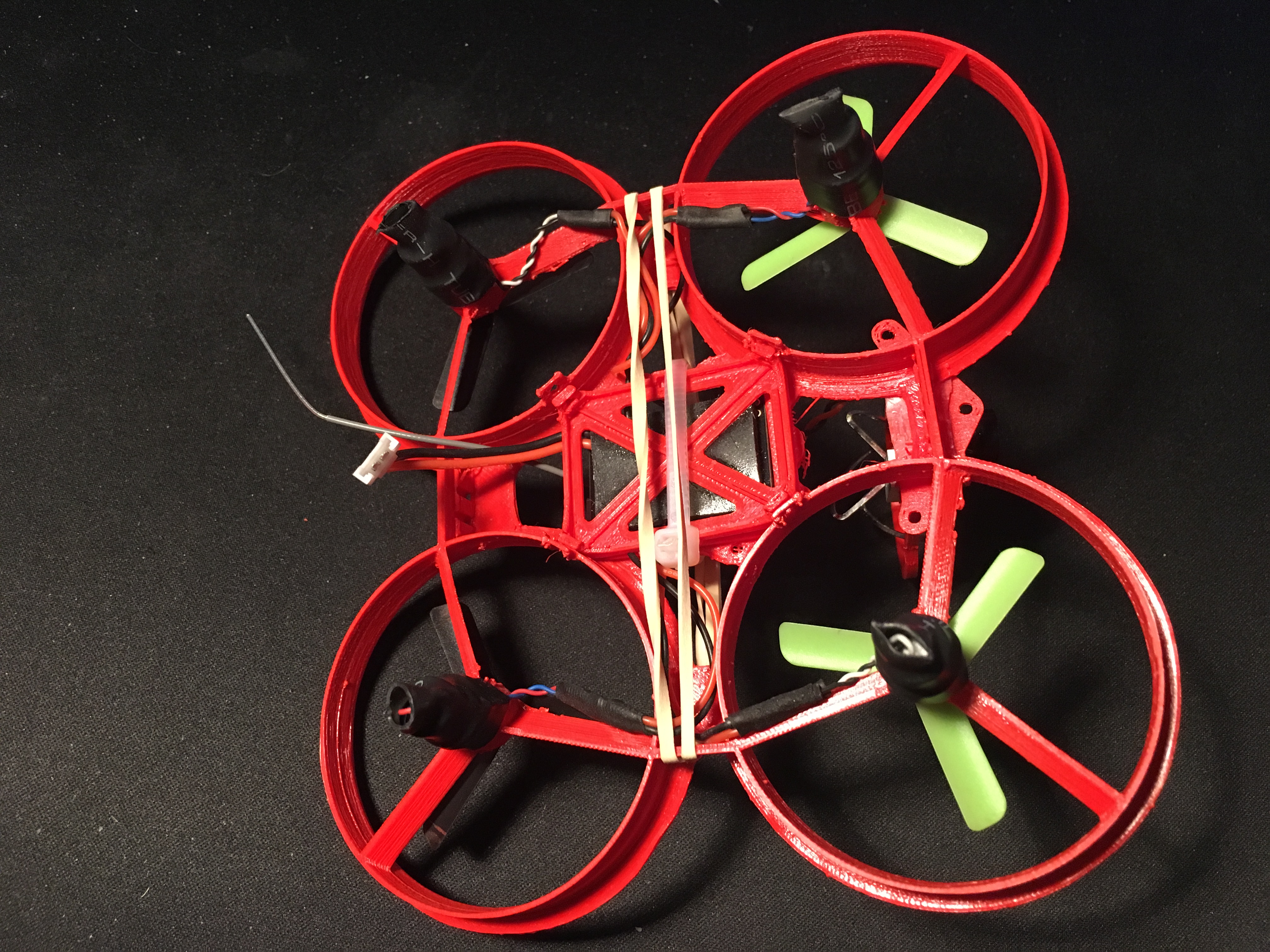 [/bs_col]
[/bs_col]
[/bs_row]
Configuration :
Pour configurer le drone et son logiciel de vol (Cleanflight), il va nous falloir quelques softs.
On va commencer par récupérer les drivers ici, installez-les et redémarrez.
Il nous faut ensuite l’application Chrome (désolé les Firefox users) de configuration de Cleanflight. Récupérez-la ici.
Commencez par binder/appareiller votre récepteur à votre transmetteur. Chaque transmetteur est différent et je ne vais détailler la procédure que pour le récepteur et la Taranis Plus.
Bind du récepteur et du transmetteur :
On créé un modèle, on choisit nos canaux et on va dans le menu du modèle. On sélectionne « Bind ». La Taranis commence à biper. Sur le récepteur, il y a un petit bouton, maintenez-le enfoncé et ensuite branchez la batterie. La LED devrait rester éteinte ou allumée (ça dépend de la version de ce récepteur) mais pas clignoter. Vous pouvez débrancher la batterie et sortir du « bind mode » de la Taranis.
Maintenant que le récepteur est « bindé », on peut passer à la configuration de CleanFlight.
Configuration de CleanFlight :
Je ne vais pas détailler tout les onglets et tout ce que l’on peut faire avec une carte de vol et CleanFlight, ça sera aussi pour un autre article 😉
Une fois branché à la carte, sélectionnez le bon port de communication (dans mon cas COM10) et cliquez sur « connecter ».
Une fois connecté, CleanFlight vous affiche l’écran de « Setup » suivant :

La première chose à faire est de calibrer l’accéléromètre. Pour se faire, mettez-le drone bien à plat puis cliquez sur le bouton « Calibrate Accelerometer ». Après quelques secondes, un message de succès devrait être affiché dans la barre du haut. Si ce n’est pas le cas, réessayez. Apres ça, vous devrez voir le modèle 3D bouger en même temps que vous bougez le drone.
On passe à l’onglet suivant, les Ports.
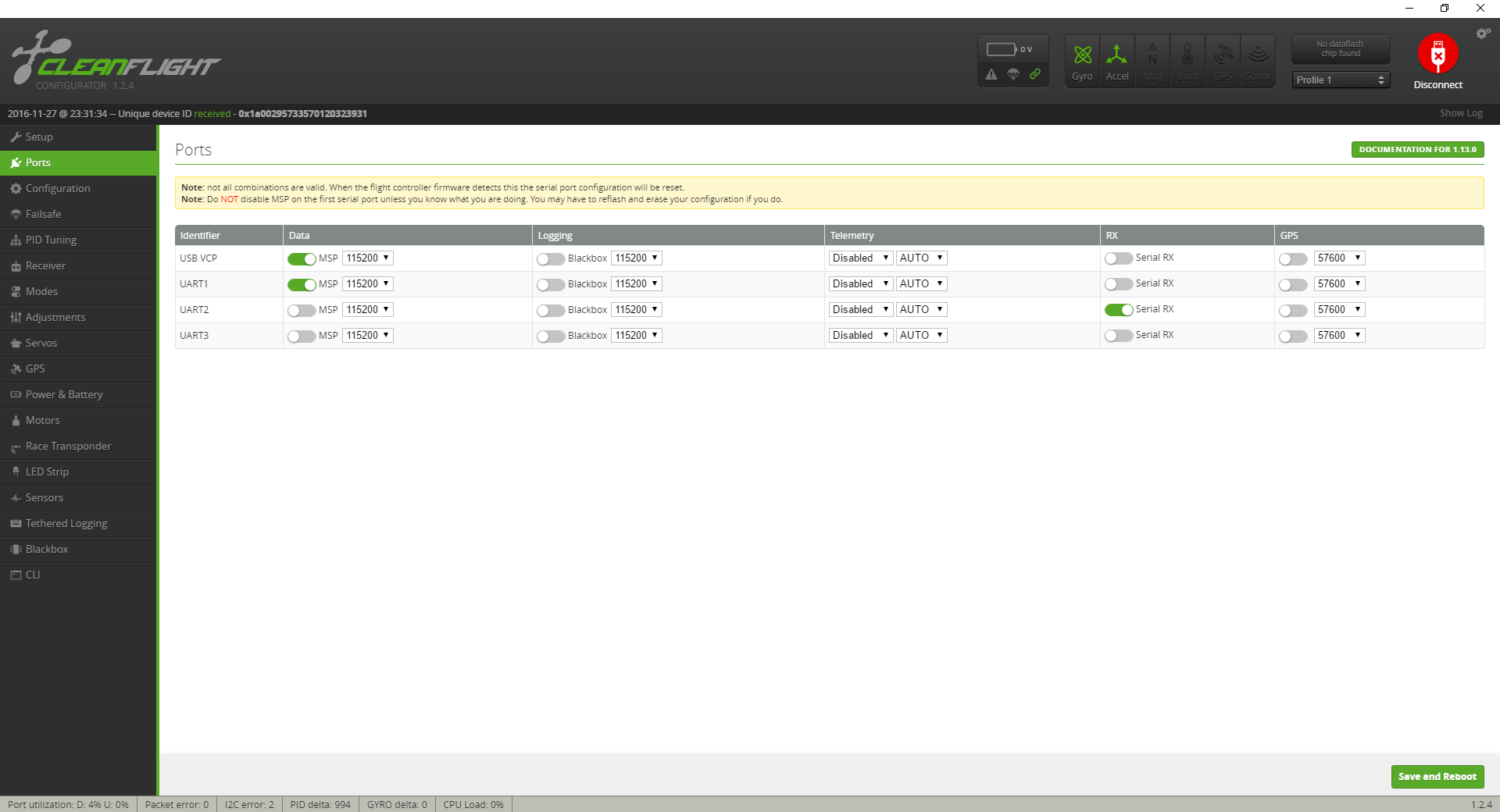
En fonction du récepteur que vous aurez choisi, le port UART sera différent que celui affiché plus haut. Dans mon cas, le port UART2 est en mode Serial RX. Surtout ne décochez pas UART1 MSP ni USB VCP MSP sinon vous ne pourrez plus vous connecter en USB à votre FC (Carte de vol). Cliquez ensuite sur le petit bouton en bas à droite « Save and Reboot ». La carte va redémarrer et se reconnecter.
On passe à l’onglet Configuration.
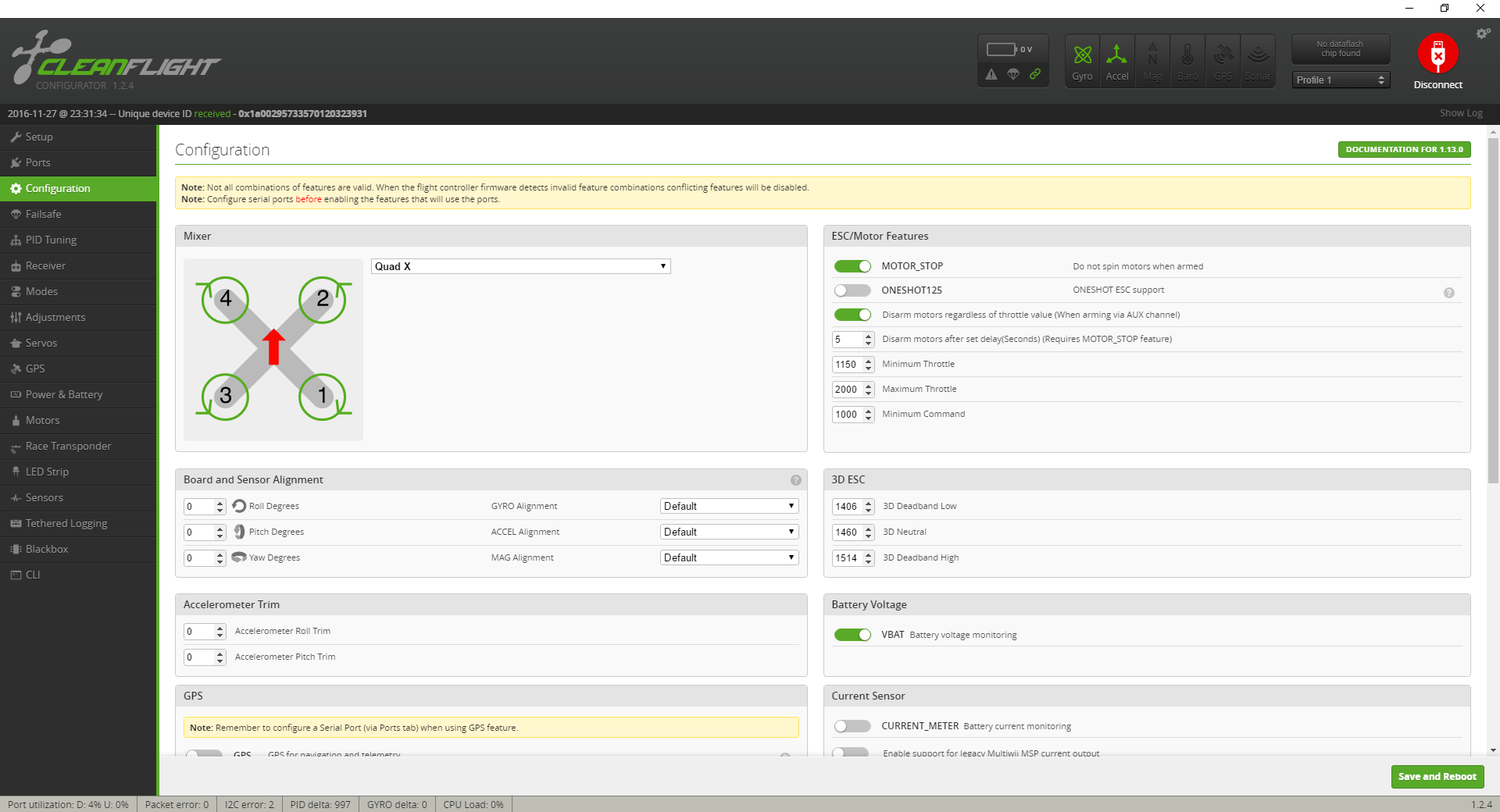
Ici, pleins de paramètres mais très peu de réglages pour nous, la carte et le drone étant simple, peu de fonctionnalités nous sont utiles/possibles. Faites en sorte que tous vos paramètres soient les mêmes que les miens. La section « Accelerometer Trim » peut vous aider plus tard si vous avez une dérive dans un des axes (ce qui peut arriver si votre carte de vol est mal alignée).
On « Save and Reboot ». N’oubliez pas de le faire a chaque fois sinon il n’y aura pas de modification. On passe à la suite, le FailSafe.
Le FailSafe c’est le système qui s’active si vous perdez le signal du transmetteur.
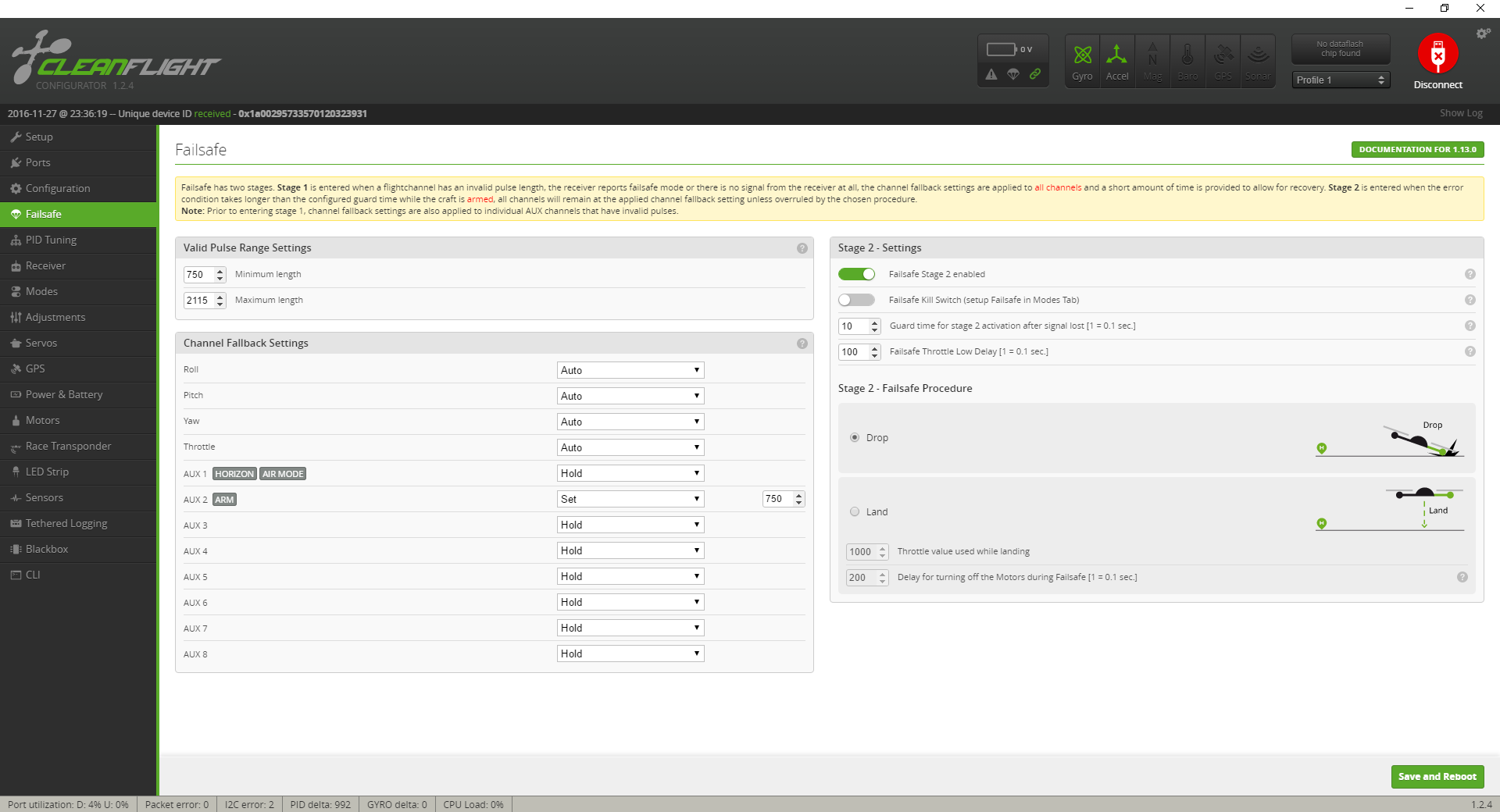
Dans l’onglet « Stage 2 – Settings », activez le FailSafe Sateg 2 et dans la « Procedure » sélectionnez « Drop ». On préférera Drop plutôt que Land afin d’éviter que les moteurs ne tourne et puissent blesser les personnes éventuelles. Et comme d’habitude, « Save and Reboot ».
Onglet suivant, « Receiver » !
[bs_row class= »row »]
[bs_col class= »col-sm-6″]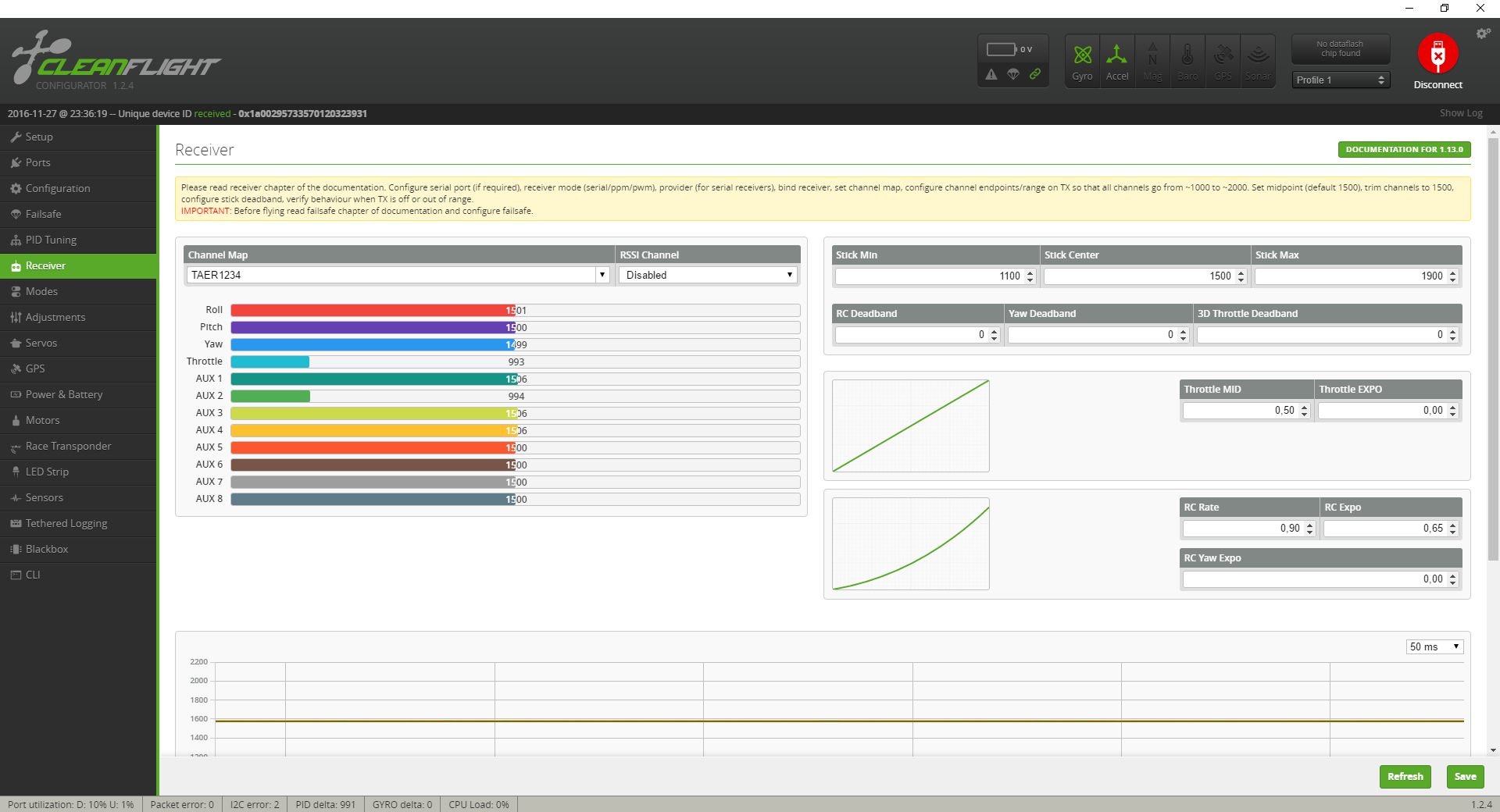 [/bs_col]
[/bs_col]
[bs_col class= »col-sm-6″]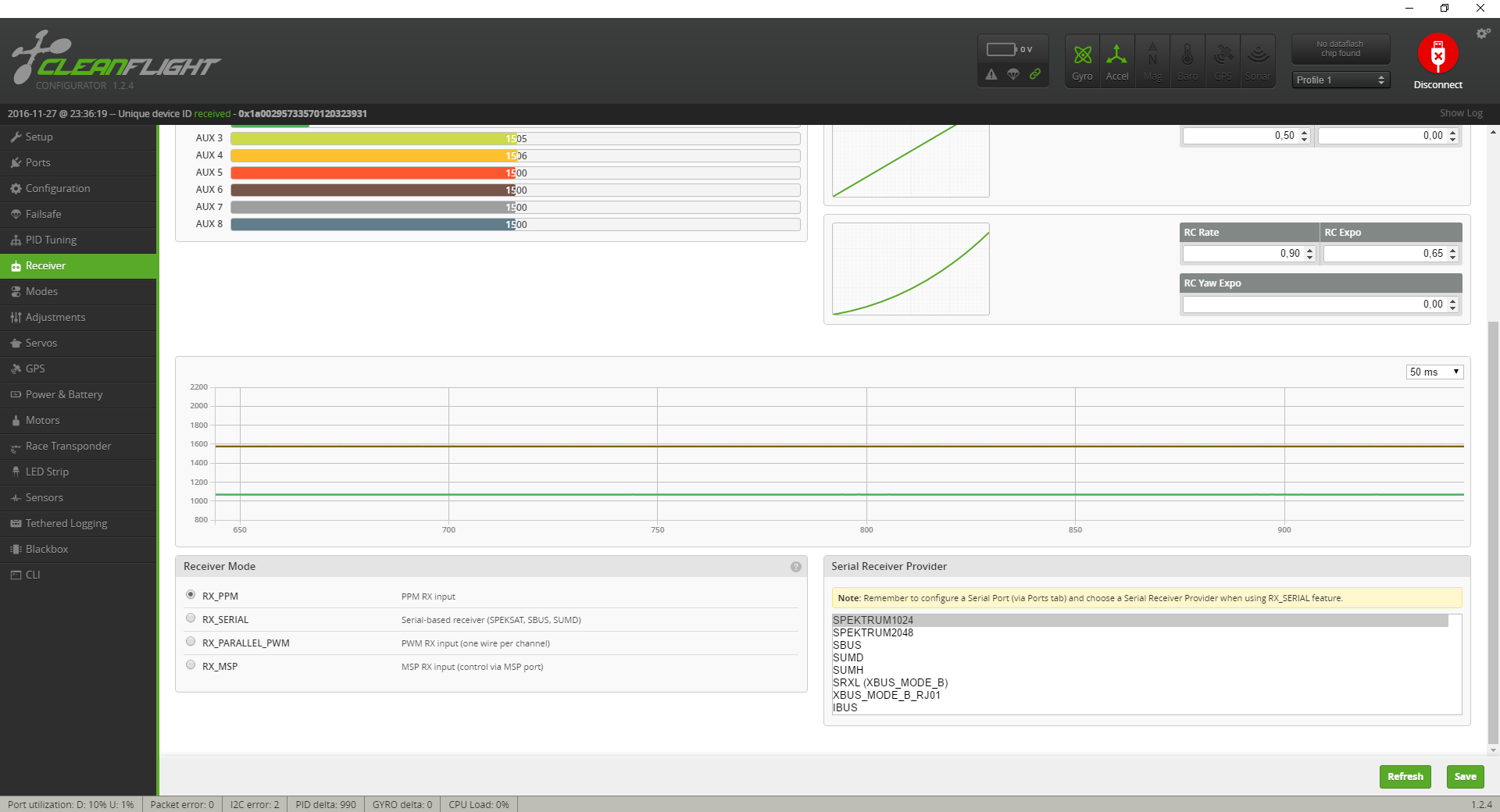 [/bs_col]
[/bs_col]
[/bs_row]
Cet onglet nous permet de vérifier le bon fonctionnement du transmetteur. Mais avant il faut sélectionner le bon protocole de communication entre la Carte de vol et le récepteur. Mon récepteur communique en PPM. Je mets donc le « Receiver Mode » en PPM et je clique sur « Save ». Ensuite je vérifie si les canaux sont bons et si c’est pas le cas, je les change sur mon transmetteur.
Une fois que c’est réglé, on va faire un tour du coté des « Modes ».
[bs_row class= »row »]
[bs_col class= »col-sm-6″] [/bs_col]
[/bs_col]
[bs_col class= »col-sm-6″]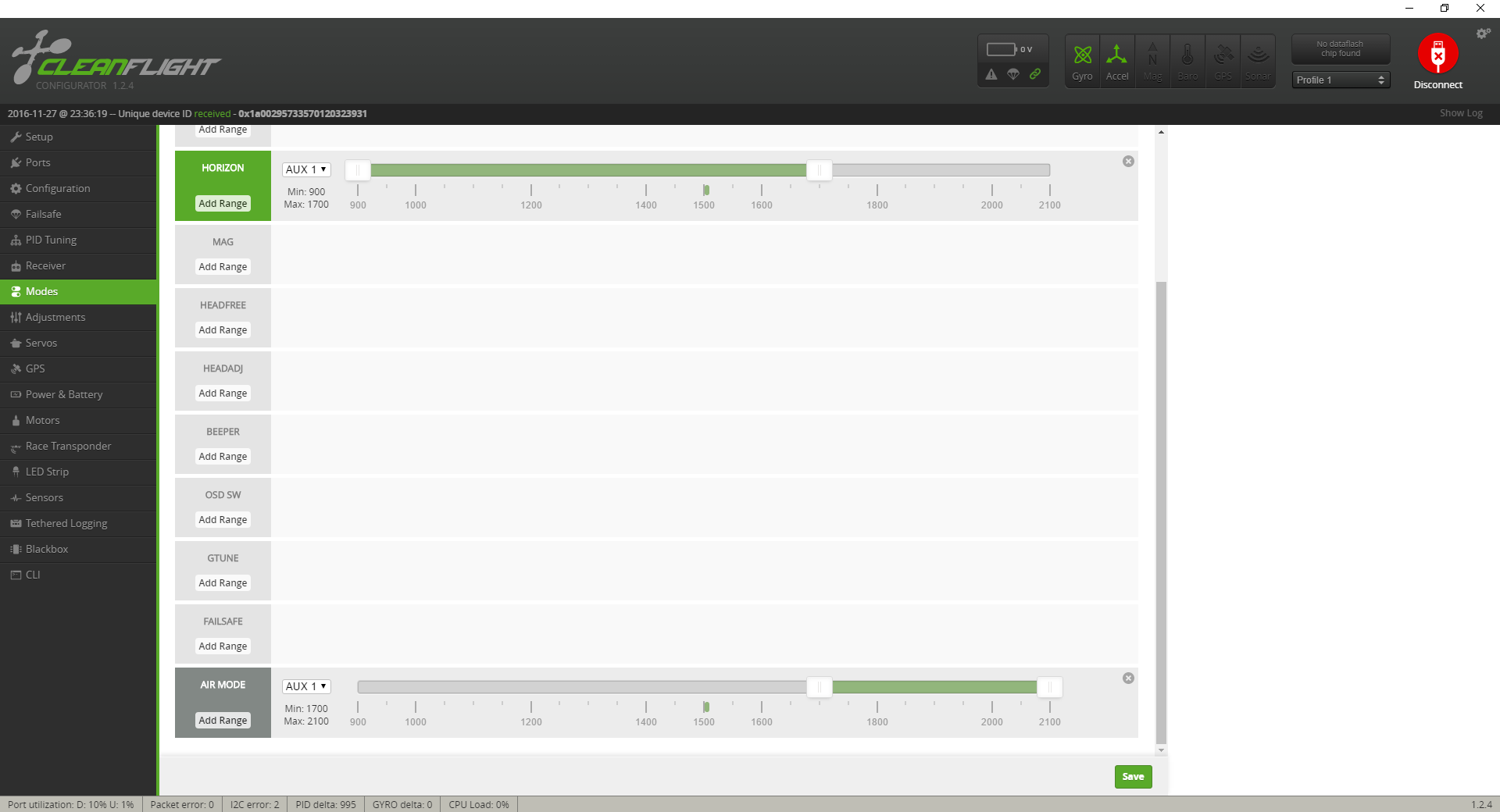 [/bs_col]
[/bs_col]
[/bs_row]
Je n’ai mis que 2 modes de vol et bien sûr de quoi armer le drone. J’ai le mode de vol Horizon qui est stabilisé toutefois au-delà d’un certain niveau d’entrée des sticks sur la radio (transmetteur) on peut faire des flips. Le mode « Accro » ou ici « Air Mode » est le mode de vol des pilotes où les sticks donnent des ordres de changement d’angle. Mais je parlerais de tout ces modes dans un futur article.
On clique sur « Save » et on vérifie que nos canaux sur la Radio et sur CleanFlight sont bons.
On va maintenant configurer les moteurs dans l’onglet « Motors ».
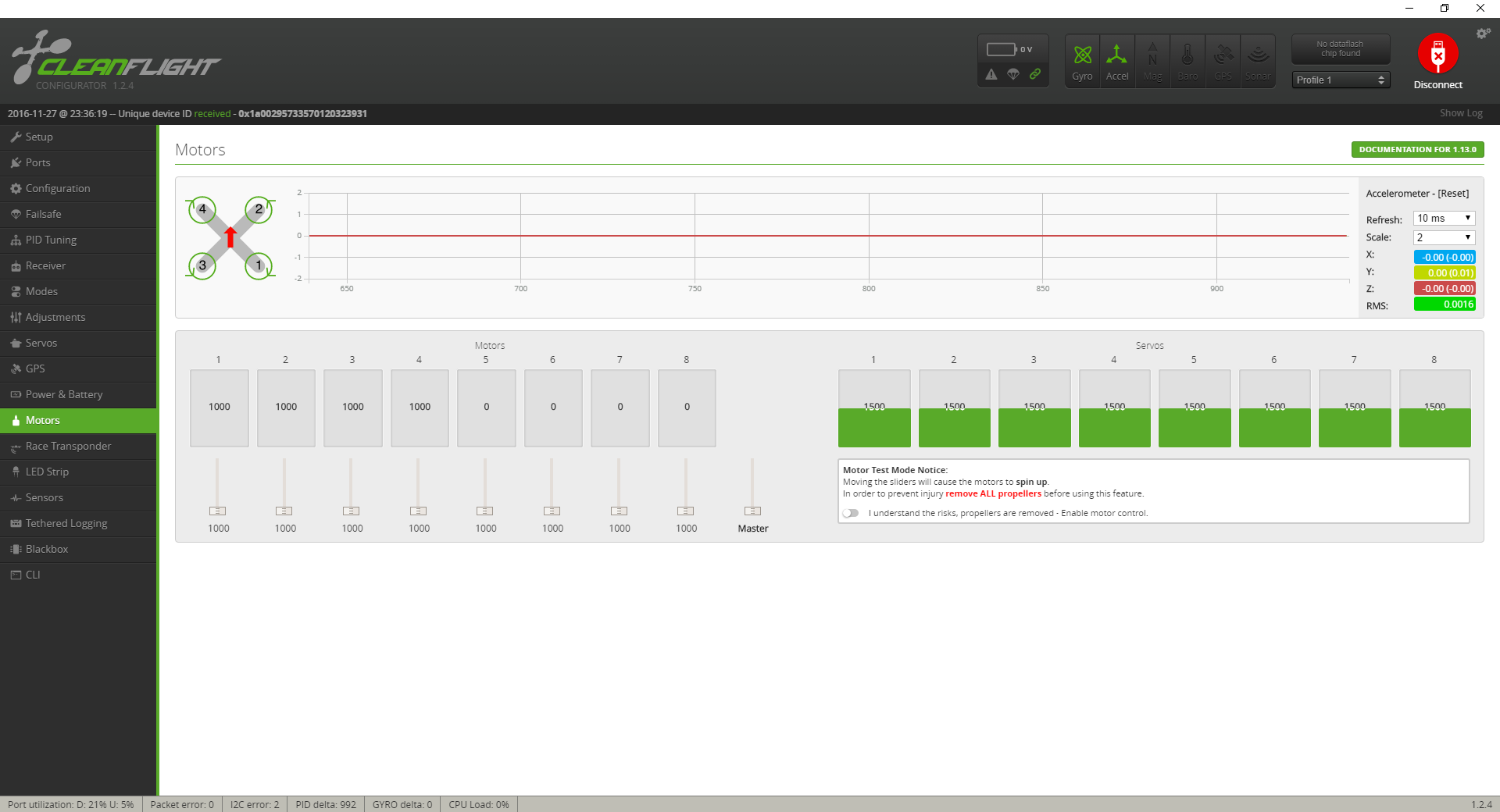
On va maintenant voir si le branchement des moteurs a bien été fait ;). Pour ça, on clique sur le petit bouton « I understand the Risks… » MAIS ATTENTION, veillez à ce que vos hélices soit bien enlevées avant de continuer. Ne mettez vos hélices que quand vous vous apprêtez à voler. Testez vos moteurs (en branchant une batterie) un par un en vérifiant, avec le schéma en haut, qu’ils tournent bien dans le bon sens.
Et voilà, notre carte de vol est prête ! On monte les hélices dans le bon sens et on charge les batteries !
Pour monter les hélices, faites bien attention, elles sont différentes et ne sont pas faites pour tourner dans le même sens (A horaire, B anti-horaire).

On allume notre Radio, on branche la batterie, on allume nos lunettes/casque/écran et c’est parti !
Améliorations :
Je n’ai pas encore testé mais changer les hélices pour des un peu plus grandes peut améliorer l’autonomie ou la poussée. Certains ont testé avec des ladybirds et ils préfèrent. A voir aussi si une batterie plus grosse peut changer ce manque d’autonomie.
Ce ne sont que des pistes, mais vous pouvez essayer 😉
Vidéo :
Si vous avez aimé cet article, vous pouvez m’aider en le partageant et si vous avez des questions ou des commentaires, c’est en dessous que ça se passe 😉






0 comments found
Comments for: Construction du Drone imprimé en 3D – Whoopee